1个人简介

邓震,工学博士、副教授,硕士生导师。博士毕业于德国汉堡大学,福建省高层次人才C类(境外)、“福建省智慧医工联合工程中心”成员。主要从事柔性机器人感知与控制、医疗手术机器人等研究工作,主持国家重点研发计划“智能机器人”重点专项子课题、国家自然科学基金面上项目和青年项目、福建省自然科学基金面上项目、科技厅对外合作项目等,参与福建省卫健委重大专项等项目5项,承担企业应用横向项目4项。以第一作者或通讯发表机器人领域SCI论文30余篇、授权国家发明专利10余项、软件著作权1项、获得福建省科技进步奖二等奖(2025)、三等奖(2022)和福建省教学成果奖一等奖(2024)。担任中国自动化学会CAA智能机器人委员会委员、CCF智能机器人专委会委员、CAAI认知系统与信息处理专委会委员、CHCA医工融合分会委员以及《Journal of Integration Technology》与《Robot Learning》期刊青年编委。
个人主页:https://jxxy.fzu.edu.cn/info/1219/7057.htm
2亮点工作
亮点工作1
致力于柔性机器人及医疗应用研究,研发出两款自然腔道介入柔性机器人系统:气管插管机器人(RNIS)和泌尿道介入柔性机器人(RUSS)。RNIS系统的研发历经三代样机迭代升级,集成了内窥镜导航定位、主-从遥操作控制、自主操作控制和安全预警等技术方法, 机器人能够准确感知气道环境,实现准确且平稳的气道内移动,以完成气管插管任务。于2023年04月25日在福州大学省立医院成功开展了国内首例机器人气管插管术的人体临床试验(获福建日报、海峡网及学习强国等主流媒体报道),相关研究成果获得2023年度福建省科技进步二等奖。

亮点工作2
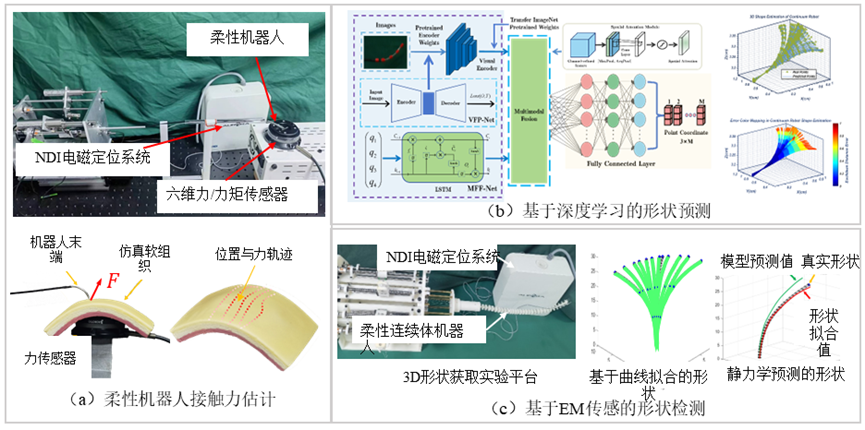
在柔性机器人的感知方法方面积累了良好的理论基础和实践经验。提出了基于深度学习的形状感知方法,开展了基于Cosserat-Rod模型的形状预测方法,实现柔性机器人三维形状感知;提出了将接触力感知建立为优化问题,提出了机器人接触力估计方法,应用于手术机器人安全运动控制中,建立基于损伤生物力学的接触力阈值建模和接触模态识别方法,保证机器人手术操作的安全性。
亮点工作3
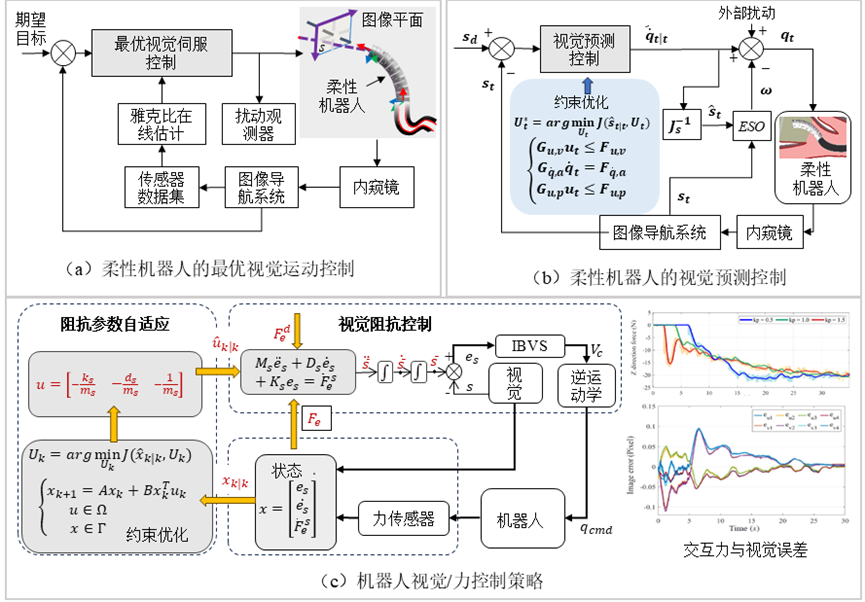
在柔性机器人控制方面,在运动控制、形状控制及安全交互控制等方向有良好的技术及方法积累。 针对腔道内自主导航难题,提出了柔性机器人最优视觉伺服控制方法,提出了可视化约束下的视觉运动控制方法,结合模型预测控制实现了柔性机器人最优控制;面向柔性机器人复杂形变控制需求,提出了数据驱动的形状控制方法,实现柔性机器人最优形状控制调控;针对机器人与环境间安全交互难题,提出了机器人视觉阻抗控制方法,保障了运动定位的高精度和接触交互的柔顺性。
3代表性成果
[1] Deng, Z., Wei, X., Pan, C., Li, G., & Hu, Y. (2024). Shared control of tendon-driven continuum robots using visibility-guaranteed optimization for endoscopic surgery. IEEE Transactions on Medical Robotics and Bionics, 6(2), 487-497.
[2] Deng, Z., Liu, W., Li, G., & Zhang, J. (2024). Constrained Visual Predictive Control of a Robotic Flexible Endoscope with Visibility and Joint Limits Constraints. IEEE Robotics and Automation Letters.
[3] Deng, Z., Zhang, S., Guo, Y., Jiang, H., Zheng, X., & He, B. (2024). Assisted teleoperation control of robotic endoscope with visual feedback for nasotracheal intubation. Robotics and Autonomous Systems, 172, 104586.
[4] He, Y., Deng, Z.*, & Zhang, J. (2021). Design and voice‐based control of a nasal endoscopic surgical robot. CAAI Transactions on Intelligence Technology, 6(1), 123-131.
[5] He, S., Zou, C., Deng, Z.*, Liu, W., He, B., & Zhang, J. (2024). Model-less optimal visual control of tendon-driven continuum robots using recurrent neural network-based neurodynamic optimization. Robotics and Autonomous systems, 182, 104811.
[6] 邓震, 郑晓春, 何炳蔚, 江培杰, 张胜战, & 陈晓辉. (2021). 一种多运动模式的自适应型导管输送装置及其工作方法. ZL202110557219.1.
[7] 邓震, 郑晓春, 何炳蔚, 张胜战, 林龙盛, & 郑艇等. (2021). 一种尺寸自适应的力解耦式导管输送装置及其工作方法. ZL202110557225.7.
[8] 经鼻气管插管手术图像导航系统V1.0, 2023SR0044410, 原始取得, 全部权利, 2022-05 15 (软件著作权)
[9] 邓震(2/10); 机器人辅助围术期气道智能管理与精准干预关键技术及应用, 福建省科学技术奖励委员会, 科技进步, 省部二等奖, 2025
[10] 邓震(3/10); 神经外科手术协同训练系统开发及云应用, 福建省科学技术奖励委员会, 科技进步, 省部三等奖, 2022



